Quadruped Robot System Overview | Petoi
Petoi programmable quadruped robots are mini but powerful and affordable robots that can play tricks like real animals.

They move with four legs rather than wheels. Legged motion gives them more freedom to navigate unstructured terrains, and expresses the joy of life whenever they move. Such dynamic maneuverability was only seen on a few luxury robots from the best labs or tycoon companies previously, such as Boston Dynamics Spot or Sony Aibo.
robot dog Bittle walking and self-righting
Highlights
-
Petoi open source robot kits are brought to life by assembling its puzzle-like frames and configured & remote controlled via Petoi mobile app.
-
They are programmable via C/C++/Python.
-
They have dynamic agile maneuverability and gaits that are performed like real four-legged animals.
-
With our customized Arduino board coordinating all instinctive and sophisticated movements, you can clip on various sensors to bring in sensing and perception.
-
Inject artificial intelligence capabilities by mounting a Raspberry Pi or other AI chips through wired/wireless connections.
-
Built on the popular open source robotic pet framework OpenCat , Petoi robots acts as an open platform for any robotic dream.
-
Petoi programmable robot pets makes a perfect tool for learning, teaching, researching, or a surprising gift to impress your family and friends.
System Overview
To solve the varies challenges and strike a fine balance of cutting-edge technology and cost-effectiveness to fit in a compact form factor that can be commercialized, affordable, and mass-producible, we've designed and engineered a robotic system of five major components: body frame, actuator, electronics, power source, and the software to coordinate all the hardware to perform varied tasks.
Body frame
Our open source robots are designed with interlocking frame as a puzzle with a few screws involved. Most body parts are symmetric for simplicity and aesthetics.
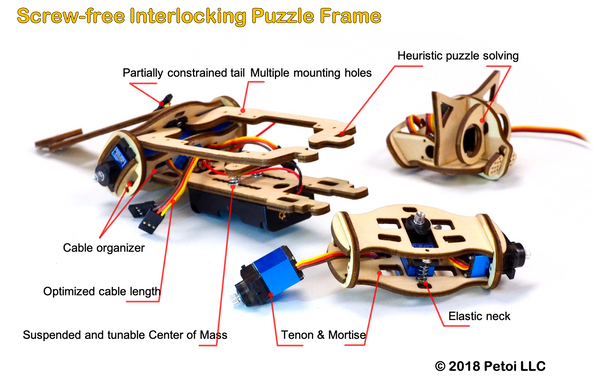
robot cat Nybble frames
Build robot dog Bittle on your own!
Actuators
A great actuator is the core of any quadruped walking robot. As the pioneer in mini quadruped robots, we found no off-the-shelf servos when we started to produce our products. So we first ODMed a precise servo with perfectly tuned PID to meet the challenges of powerful, fast yet stable quadruped walking for Nybble. For the second product Bittle, working with the factory from the very first day with many iterations, we designed a brand new servo P1S that's slim and fast with a controllable angle of 270 degrees.
High Performance Digital Servos
We use nine metal or plastic servos to actuate Bittle. Eight of them are for walking joints, and one is for head panning. We will also include one spare servo for replacement, as brushed motors are consumable after a certain period of wearing. You may order the "Bittle Servo Set" perk if you expect to use Bittle intensively for teaching or researching.
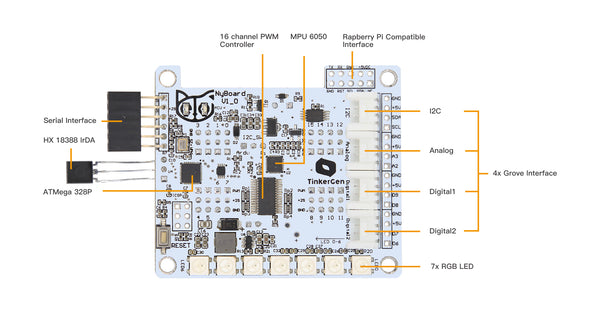
Electronics
Petoi Arduino robots are driven by NyBoard V1, a customized Arduino board with rich peripherals. We fully utilized the chip of a regular Arduino Uno to coordinate sophisticated motions. The board can drive at least 12 PWM servos, and an IMU (Inertial Measurement Unit) is used for balancing. It stores "muscle memory" and detects body status (orientation and acceleration) for balancing. We provide an infrared remote to trigger basic movements. The board also listens to string commands from the serial port, such as "walk", "sit", or more detailed instructions for individual joints.
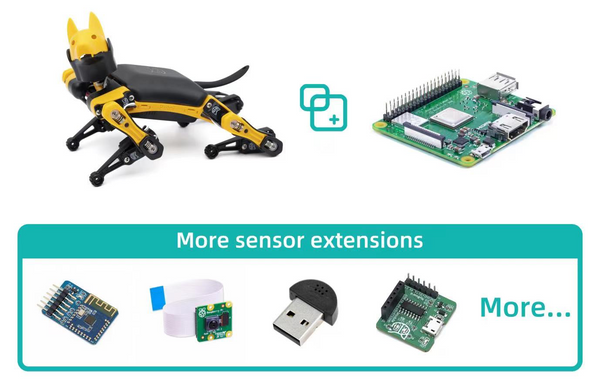
NyBoard V1 has been driving thousands of Petoi Arduino robot dogs and cats all over the world. We continue to provide a 2x5 socket on NyBoard V1 for mounting Raspberry Pi. It powers the Pi and communicates with it through the serial or I2C network. The Pi gives Petoi Arduino robots the ability to analyze more sensory data, get connected to the Internet, and make decisions by itself. You may need to tilt the Pi and 3D print some supporting structures depending on which Petoi Arduino robot you use.
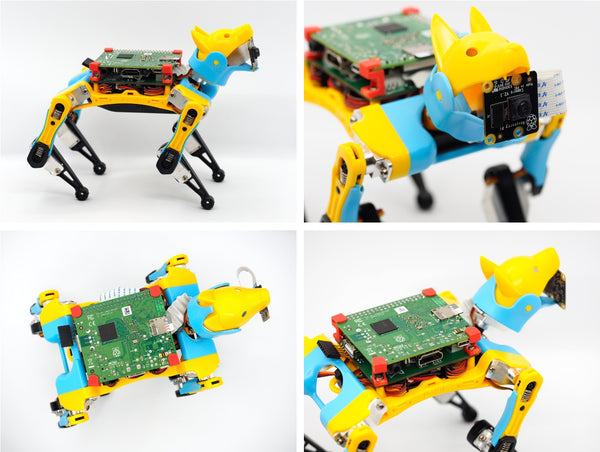
Raspberry Pi 3 A+ and Pi camera on Bittle
Thanks to the Arduino and Raspberry Pi community, you can find many customization ideas for Bittle. There are four Seeed Grove sockets on NyBoard V1 for extensible modules. To make installation easier, we designed Bittle's head as a clip to bite on those modules. That explains why we created a dog out of OpenCat this time. There's also a screw hole inside Bittle's head for fixing additional modules.
We developed a Bluetooth dongle for wirelessly uploading codes and controlling Petoi coding robots from PC or smartphone Apps. We also developed a WiFi dongle for wirelessly communication. You can play with Petoi coding robots without messing around with cables. Wireless is also essential when you are studying balancing related motion planning. You can even utilize the computational power of a remote "brain" without being constrained by Petoi coding robot's min size and cargo capacity.
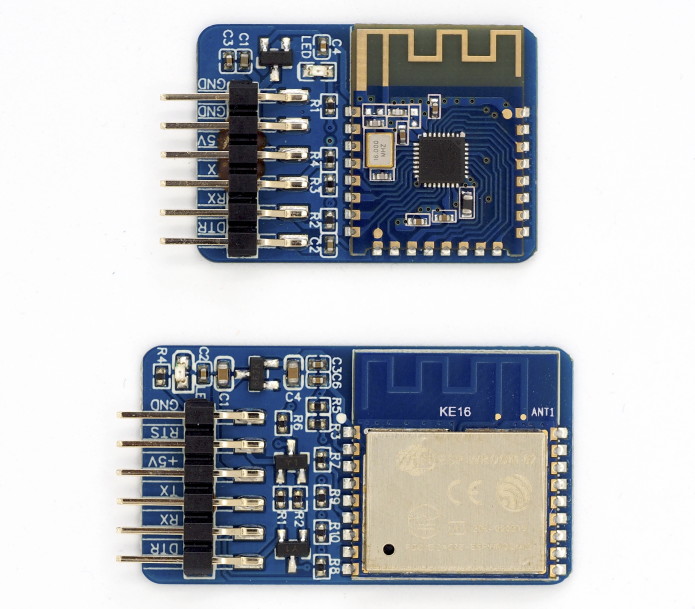
Bluetooth and WiFi dongles
Furthermore, we've developed an ESP32 development board with native Bluetooth and WiFi connectivity. We have made a functional beta version called the "BiBoard V0" for developers. It has a considerable performance boost, and you are welcome to join our exploration.
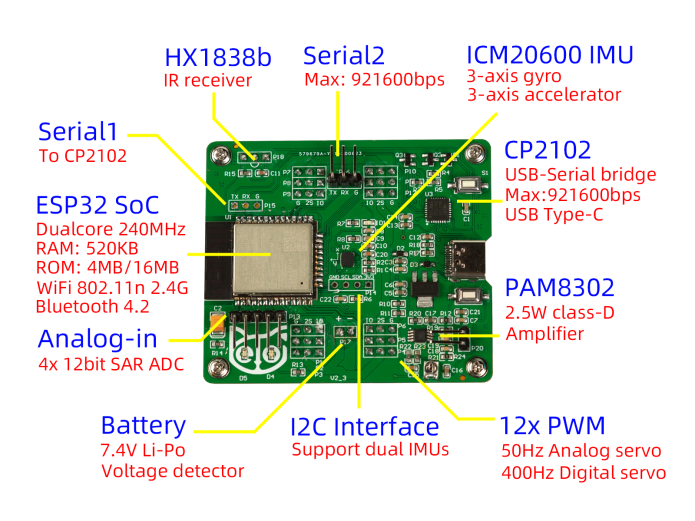
BiBoard V0
Both boards work with Nybble and Bittle. You only need to plug the servos to the right ports following the joint pins' assignment.
Software
All Petoi open source robots are driven by our OpenCat code. It has 3K lines of Arduino codes excluding 3rd party libraries. It defines the minimal data structure and algorithms for performing quadruped motion. It works for Nybble, Bittle, and the generic OpenCat programmable robots in the future. All you need is to download the default demo code from GitHub, change the model definition at the beginning of the code, then upload it to the robot.
We also provide example commander and parser in Python so that you can send instructions from other devices. The code is already running on thousands of small programmable quadruped robots, including many variants of OpenCat.

You can program Petoi coding robots at different levels in various coding environments, such as Scratch-like drag & drop coding environment Petoi Coding Blocks, C++ in Arduino IDE and Python through serial API. We also provide free robotics curriculums in Petoi Coding Blocks and C++.
 Bittle climbing up a step under realtime instructions sent through Bluetooth
Bittle climbing up a step under realtime instructions sent through Bluetooth
Power Source
We designed a Li-ion battery pack with a built-in charging and protection circuit. It can slide into the track underneath Bittle and Nybble and tune its center of mass. It can power Petoi open source robots for at least one hour of continuous walking. It also has an RGB LED to indicate the battery's status.
