What is OpenCat ?

old rrobot
nothing
Dreaming of building your own robot pets?
Countless efforts have been made to develop robots that look and behave like real pets, human's best friends. Yet quadruped robotic systems have been very complex and take a big upfront capital and lots of expertise to start. It was too difficult for individuals to get a dynamic walking robot in their hands.

Translation missing: en.1eu41esm9w6.lh_a168_title

Solution
OpenCat as the Solution
Goal: to easily build and develop quadruped robot kits by greatly lowering the cost and technical barriers
Solutions:
- use hobbyist high-performance servos as the joints
- arrange servos in an optimized body frame
- use low-cost popular hardware as the controller (Arduino, ESP32 or Raspberry Pi, etc.) to support add-on modules such as smart camera module, IoT sensors, and voice command modules
- efficient and open source control codes for vivid motion tasks

OpenCat-based Commercial Robot Pets Shipped
Countries of Users
DIY Robot Pets from Our Users
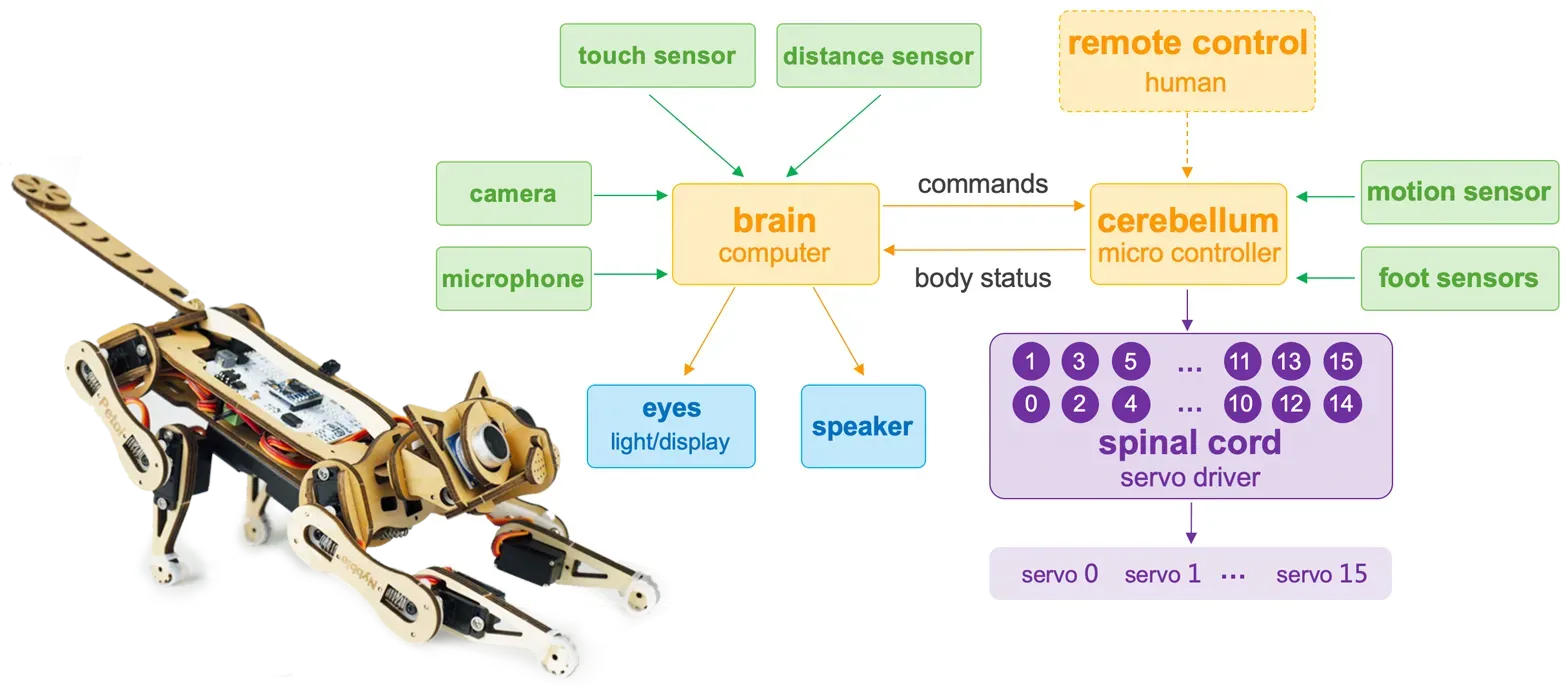
OpenCat - An Android-like OS for Legged Robots
Translation missing: en.b60y95i20xq.lh_a168_title

commercial robots
Commercial Robots Powered by OpenCat
OpenCat has been deployed on Petoi's mass-produced palm-sized, realistic lifelike Arduino robot cat Nybble and Arduino robot dog Bittle that can run, walk, and self-balance like a real animal. We've successfully crowdfunded these two open source robot building kits and brought them to thousands of users from 60+ countries.
Check out All the OpenCat Robots Around the World
Dream of building your own robot pets?
Why Do We Share via Open Source?
- to foster collaboration in the robotic motion, IoT(Internet of Things), and AI development of affordable quadruped robots with more users and developers
- to bring STEM & robotics educational resources and curricular to the mass and inspire engineering and computer science students, adults, teens, and kids of all ages
- to join the robotic AI and IoT revolution to modulate the functionalities of a complex system
Translation missing: en.mu5z0n750tb.lh_a168_title

history
How OpenCat Started
Want to learn more about OpenCat Codes?
Explore OpenCat open source robot kits







